 云计算服务
云计算服务
 服务器租用
服务器租用
 DDOS 防护
DDOS 防护
 虚拟主机
虚拟主机
 域名服务
域名服务
 基础设施
基础设施
 关于我们
关于我们
使用测程法前进并返回
由于已经了解ROS中的测量信息是怎样表示,那么就可以让机器人在计时前进并返回中移动的更精确了。不在需要基于时间和速度来猜测距离和角度。下一脚本将会通过转换自/odom和/base_link框架之间的测量信息,监视机器人的位置和方向。
在rbx1_nav/nodes目录下的新文件名为odom_out_and_back,py,
下面比较以下在模拟器和现实世界中的机器人的运动结果。
1、在ArbotiX模拟器上基于测量的前进返回
#运行模拟机器人
roslaunch rbx1_bringup fake_turtlebot.launch
#运行模拟器RViz
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
#运行命令脚本
其结果如下
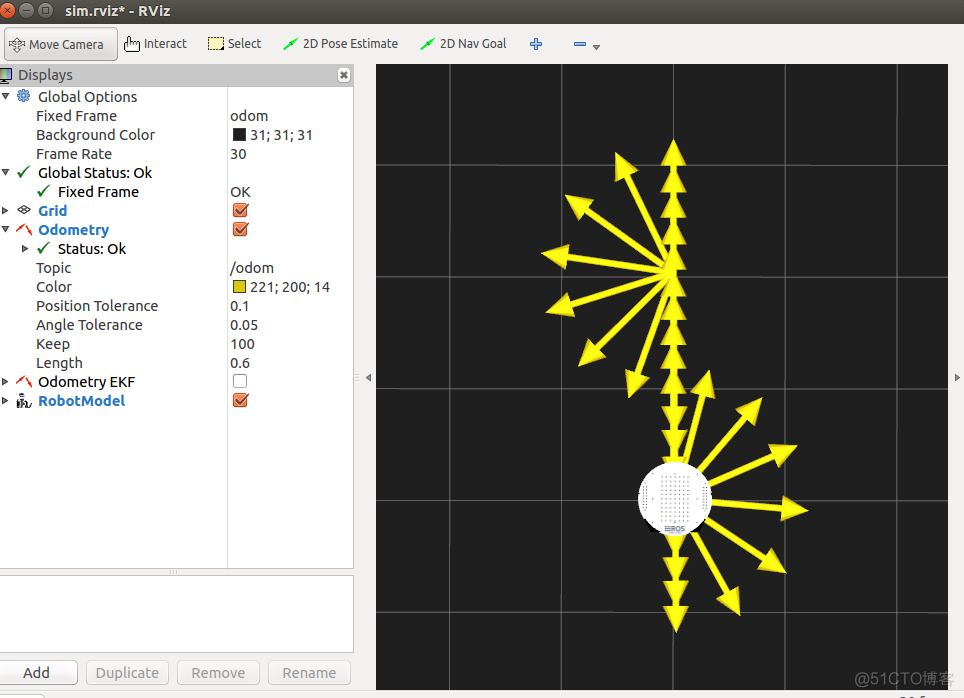
从上面结果可以看出,在一个理想的,不考虑现实环境影响的模拟器中,使用测量后的结果是几乎完美的。
2、在现实的机器人上基于测量的前进返回
如果自己有一个turtleBot或者其他兼容的ROS机器人,那么就可以在现实世界中尝试基于测量的前进返回脚本。
1)运行TurtleBot的启动文件
roslaunch rbx1_bringup turtlebot_minimal_create.launch
(如果你创建了一个存有你的校准参数的启动文件,你也可以用你自己的启动文件)
2)如果你的机器人是TurtleBot,运行odom_ekf.py脚本(在rbx1_bringup包中),然后就能在RViz中看到TurtleBot的组合测量数据框架。如果你使用的不是TurtleBot则忽略此步。这个启动文件要在TurtleBot的计算机上运行
roslaunch rbx1_bringup odom_ekf.launch
如果在前面的测试中运行了RViz,可以简单地取消选择Odometry display,选择Odometry EKF display,并略过接下来的步骤。
3)如果RViz没有运行,则使用nav_ekf配置文件,在你的工作站中运行它。这个配置文件只是简单的预先选择了/odome_ekf话题来显示组合测量数据:
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_ekf.rviz
4)最后,启动脚本
,可以在你的工作站或者用ssh连接上的机器人计算机上运行以下命令:
rosrun rbx1_nav odom_out_and_back.py





.png)

.png)

