 云计算服务
云计算服务
 服务器租用
服务器租用
 DDOS 防护
DDOS 防护
 虚拟主机
虚拟主机
 域名服务
域名服务
 基础设施
基础设施
 关于我们
关于我们
以润和DAYU200为例,展示openharmony设备上运行docker的具体过程。这里,所用的容器运行时为docker,使用containerd运行时是类似的步骤。
检测openharmony对docker容器的支持修改源码内核配置编译并在设备运行openharmony系统格式化sd卡为f2fs文件系统安装ip、iptables和awk必备组件安装docker容器引擎组件docker环境准备运行docker验证docker工作状态目的:检测openharmony标准系统是否具备安装docker的配置要求
# 配置文件的部分:下载检测脚本https://github.com/moby/moby/blob/master/contrib/check-config.shhttps://gitee.com/mirrors_moby/moby/blob/master/contrib/check-config.sh#检测脚本就是check-config.sh执行脚本
# Automatically generated file; DO NOT EDIT.
# Linux/arm64 5.10.79 Kernel Configuration
#
CONFIG_CC_VERSION_TEXT="aarch64-linux-gnu-gcc (Linaro GCC 7.5-2019.12) 7.5.0"
CONFIG_CC_IS_GCC=y
CONFIG_GCC_VERSION=70500
CONFIG_LD_VERSION=228020000
CONFIG_CLANG_VERSION=0
CONFIG_LLD_VERSION=0
CONFIG_CC_CAN_LINK=y
CONFIG_CC_CAN_LINK_STATIC=y
CONFIG_CC_HAS_ASM_GOTO=y
CONFIG_CC_HAS_ASM_INLINE=y
CONFIG_IRQ_WORK=y
CONFIG_BUILDTIME_TABLE_SORT=y
CONFIG_THREAD_INFO_IN_TASK=y
#
# General setup
#
CONFIG_INIT_ENV_ARG_LIMIT=32
# CONFIG_COMPILE_TEST is not set
CONFIG_LOCALVERSION=""
CONFIG_LOCALVERSION_AUTO=y
CONFIG_BUILD_SALT=""
CONFIG_DEFAULT_INIT=""
CONFIG_DEFAULT_HOSTNAME="localhost"
CONFIG_SWAP=y
CONFIG_SYSVIPC=y
CONFIG_SYSVIPC_SYSCTL=y
# CONFIG_POSIX_MQUEUE is not set
# CONFIG_WATCH_QUEUE is not set
CONFIG_CROSS_MEMORY_ATTACH=y
# CONFIG_USELIB is not set
CONFIG_AUDIT=y
CONFIG_HAVE_ARCH_AUDITSYSCALL=y
CONFIG_AUDITSYSCALL=y
#
# IRQ subsystem
#
CONFIG_GENERIC_IRQ_PROBE=y
CONFIG_GENERIC_IRQ_SHOW=y
CONFIG_GENERIC_IRQ_SHOW_LEVEL=y
CONFIG_GENERIC_IRQ_EFFECTIVE_AFF_MASK=y
CONFIG_GENERIC_IRQ_MIGRATION=y
CONFIG_HARDIRQS_SW_RESEND=y
CONFIG_GENERIC_IRQ_CHIP=y
CONFIG_IRQ_DOMAIN=y
CONFIG_IRQ_DOMAIN_HIERARCHY=y
CONFIG_GENERIC_IRQ_IPI=y
CONFIG_GENERIC_MSI_IRQ=y
CONFIG_GENERIC_MSI_IRQ_DOMAIN=y
CONFIG_IRQ_MSI_IOMMU=y
CONFIG_HANDLE_DOMAIN_IRQ=y
CONFIG_IRQ_FORCED_THREADING=y
CONFIG_SPARSE_IRQ=y
# CONFIG_GENERIC_IRQ_DEBUGFS is not set
# end of IRQ subsystem
CONFIG_GENERIC_IRQ_MULTI_HANDLER=y
CONFIG_GENERIC_TIME_VSYSCALL=y
CONFIG_GENERIC_CLOCKEVENTS=y
CONFIG_ARCH_HAS_TICK_BROADCAST=y
CONFIG_GENERIC_CLOCKEVENTS_BROADCAST=y
#
# Timers subsystem
#
CONFIG_TICK_ONESHOT=y
CONFIG_NO_HZ_COMMON=y
# CONFIG_HZ_PERIODIC is not set
CONFIG_NO_HZ_IDLE=y
# CONFIG_NO_HZ_FULL is not set
CONFIG_NO_HZ=y
CONFIG_HIGH_RES_TIMERS=y
# end of Timers subsystem
# CONFIG_PREEMPT_NONE is not set
CONFIG_PREEMPT_VOLUNTARY=y
# CONFIG_PREEMPT is not set
#
# CPU/Task time and stats accounting
#
CONFIG_TICK_CPU_ACCOUNTING=y
# CONFIG_VIRT_CPU_ACCOUNTING_GEN is not set
# CONFIG_IRQ_TIME_ACCOUNTING is not set
CONFIG_SCHED_THERMAL_PRESSURE=y
CONFIG_SCHED_WALT=y
# CONFIG_BSD_PROCESS_ACCT is not set
# CONFIG_TASKSTATS is not set
CONFIG_PSI=y
# CONFIG_PSI_DEFAULT_DISABLED is not set
# end of CPU/Task time and stats accounting
CONFIG_CPU_ISOLATION=y
CONFIG_SCHED_RUNNING_AVG=y
CONFIG_CPU_ISOLATION_OPT=y
CONFIG_SCHED_CORE_CTRL=y
#
# RCU Subsystem
#
CONFIG_TREE_RCU=y
# CONFIG_RCU_EXPERT is not set
CONFIG_SRCU=y
CONFIG_TREE_SRCU=y
CONFIG_TASKS_RCU_GENERIC=y
CONFIG_TASKS_RUDE_RCU=y
CONFIG_RCU_STALL_COMMON=y
CONFIG_RCU_NEED_SEGCBLIST=y
# end of RCU Subsystem
CONFIG_IKCONFIG=y
CONFIG_IKCONFIG_PROC=y
# CONFIG_IKHEADERS is not set
CONFIG_LOG_BUF_SHIFT=18
CONFIG_LOG_CPU_MAX_BUF_SHIFT=12
CONFIG_PRINTK_SAFE_LOG_BUF_SHIFT=13
CONFIG_GENERIC_SCHED_CLOCK=y
用check-config.sh去检测我们上面导出的内核配置 ./check-config.sh /home/.config
检查结果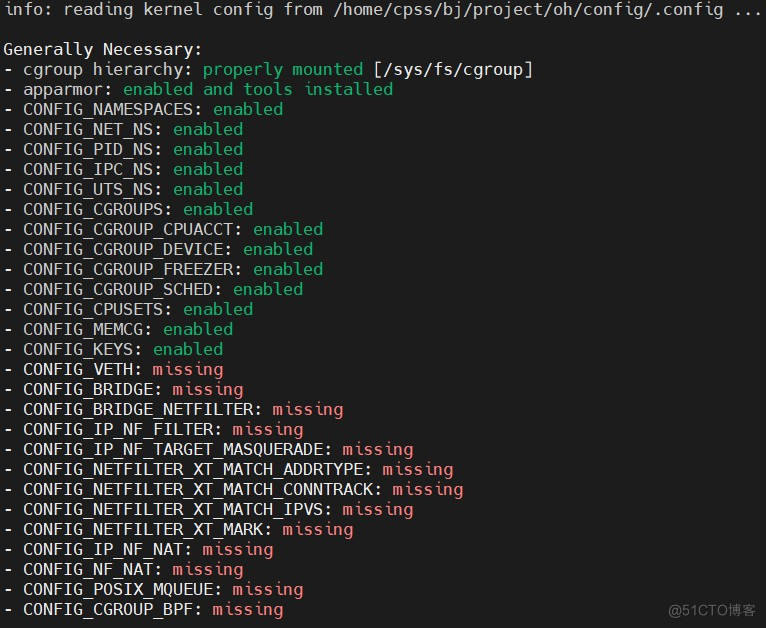
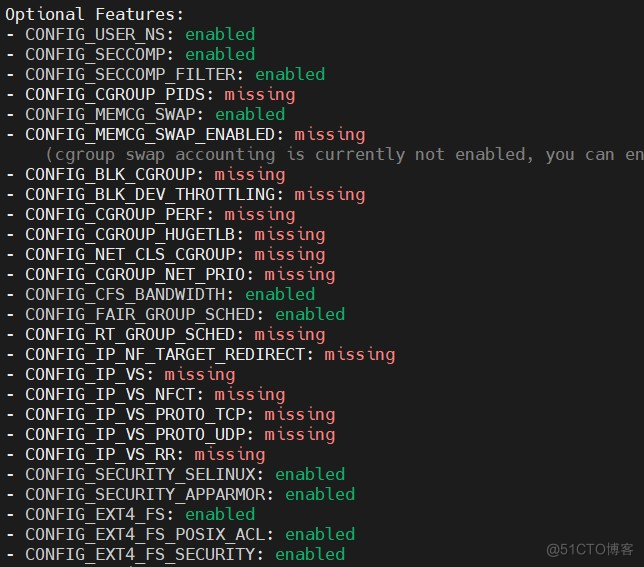
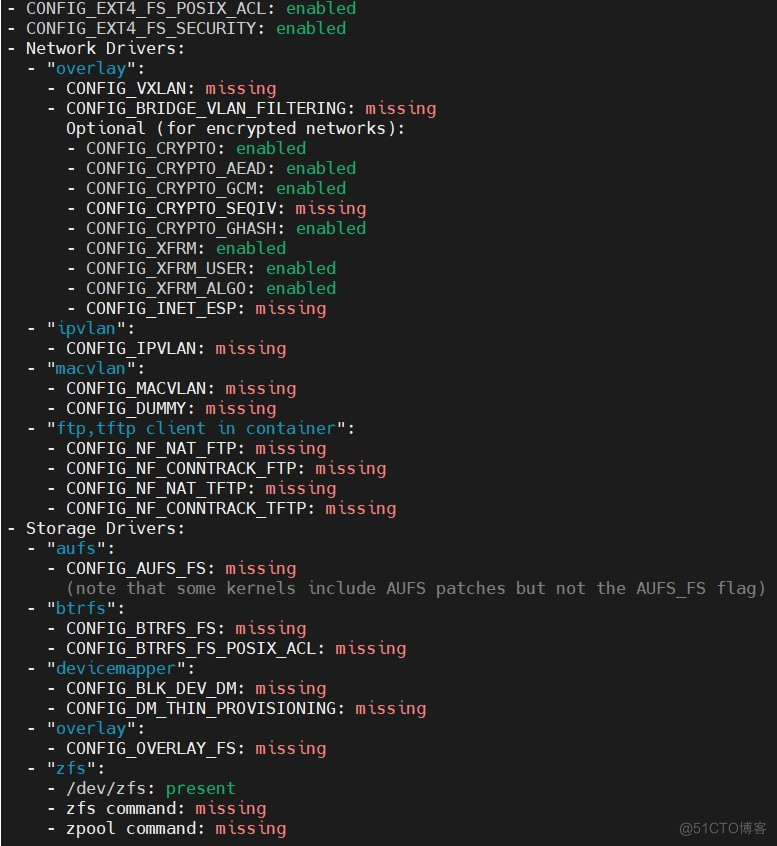
依据上述check的结果
需要将必选/可选的都打开Network Drivers部分:我们一般用bridge就可以了,暂不用再开其它了。Storage Drivers部分: 打开overlay部分就可以了。修改源码的内核配置修改openharmony3.1/kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig (主要集中再namespace, control group, network, overlay filesystem等方面支持的追加)增加如下配置:
--- configbk 2022-09-19 14:54:36.873667819 +0800
+++ /home/cpss/bj/project/openharmony31/kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig 2022-09-03 15:31:29.170980918 +0800
@@ -30,6 +30,7 @@
+CONFIG_POSIX_MQUEUE=y
+CONFIG_SCHED_WALT=y
+CONFIG_PSI=y
+CONFIG_PAGE_COUNTER=y
+CONFIG_CGROUP_BPF=y
+CONFIG_MEMCG_KMEM=y
+CONFIG_MEMCG_SWAP_ENABLED=y
+CONFIG_BLK_CGROUP=y
+CONFIG_BLK_DEV_THROTTLING=y
+CONFIG_RT_GROUP_SCHED=y
+CONFIG_CGROUP_PIDS=y
+CONFIG_CGROUP_HUGETLB=y
+CONFIG_CGROUP_PERF=y
+CONFIG_NET_CLS_CGROUP=y
+CONFIG_BPF_SYSCALL=y
+CONFIG_BINFMT_MISC=y
+CONFIG_TLS=y
+CONFIG_IP_MULTIPLE_TABLES=y
+CONFIG_IP_MROUTE_MULTIPLE_TABLES=y
+CONFIG_INET_ESP=y
+CONFIG_IPV6_MIP6=y
+CONFIG_IPV6_MULTIPLE_TABLES=y
+CONFIG_IPV6_MROUTE=y
+CONFIG_IPV6_MROUTE_MULTIPLE_TABLES=y
+CONFIG_NF_CONNTRACK=y
+CONFIG_NETFILTER_XT_MARK=y
+CONFIG_NETFILTER_XT_SET=y
+CONFIG_NETFILTER_XT_TARGET_CHECKSUM=y
+CONFIG_NETFILTER_XT_MATCH_ADDRTYPE=y
+CONFIG_NETFILTER_XT_MATCH_CONNTRACK=y
+CONFIG_NETFILTER_XT_MATCH_IPVS=y
+CONFIG_NETFILTER_XT_MATCH_CGROUP=y
+CONFIG_IP_SET=y
+CONFIG_IP_SET_HASH_IP=y
+CONFIG_IP_SET_HASH_NET=y
+CONFIG_IP_VS=y
+CONFIG_IP_VS_NFCT=y
+CONFIG_IP_VS_PROTO_TCP=y
+CONFIG_IP_VS_PROTO_UDP=y
+CONFIG_IP_VS_RR=y
+CONFIG_IP_VS_WRR=y
+CONFIG_IP_VS_SH=y
+CONFIG_IP_NF_MATCH_STATE=y
+CONFIG_IP_NF_MATCH_LIMIT=y
+CONFIG_IP_NF_TARGET_LOG=y
+CONFIG_NF_NAT=y
+CONFIG_IP_NF_FTP=y
+CONFIG_IP_NF_TARGET_REDIRECT=y
+CONFIG_IP_NF_CONNTRACK=y
+CONFIG_IP_NF_IRC=y
+CONFIG_IP_NF_NAT=y
+CONFIG_IP_NF_FILTER=y
+CONFIG_IP_NF_TARGET_MASQUERADE=y
+CONFIG_BRIDGE=y
+CONFIG_BRIDGE_NETFILTER=y
+CONFIG_CGROUP_NET_PRIO=y
+CONFIG_STREAM_PARSER=y
+CONFIG_DRIVERS_HDF_LIGHT=y
+CONFIG_HYPERHOLD=y
+CONFIG_HYPERHOLD_DEBUG=y
+CONFIG_HYPERHOLD_ZSWAPD=y
+CONFIG_HYPERHOLD_FILE_LRU=y
+CONFIG_HYPERHOLD_MEMCG=y
+CONFIG_ZRAM_GROUP=y
+CONFIG_ZRAM_GROUP_DEBUG=y
+CONFIG_ZLIST_DEBUG=y
+CONFIG_ZRAM_GROUP_WRITEBACK=y
+CONFIG_REGMAP_SPI=y
+CONFIG_MACVLAN=y
+CONFIG_VXLAN=y
+CONFIG_AUFS_FS=y
+CONFIG_VETH=y
+CONFIG_DRM_DW_HDMI_I2S_AUDIO=y
+CONFIG_SND_TIMER=y
+CONFIG_SND_PCM=y
+CONFIG_SND_PCM_ELD=y
+CONFIG_SND_PCM_IEC958=y
+CONFIG_SND_DMAENGINE_PCM=y
+CONFIG_SND_HWDEP=y
+CONFIG_SND_SEQ_DEVICE=y
+CONFIG_SND_RAWMIDI=y
+CONFIG_SND_JACK=y
+CONFIG_SND_JACK_INPUT_DEV=y
+CONFIG_SND_PCM_TIMER=y
+CONFIG_SND_HRTIMER=y
+CONFIG_SND_DYNAMIC_MINORS=y
+CONFIG_SND_MAX_CARDS=32
+CONFIG_SND_PROC_FS=y
+CONFIG_SND_VERBOSE_PROCFS=y
+CONFIG_SND_SEQUENCER=y
+CONFIG_SND_SEQ_DUMMY=y
+CONFIG_SND_SEQ_HRTIMER_DEFAULT=y
+CONFIG_SND_SEQ_MIDI_EVENT=y
+CONFIG_SND_SEQ_MIDI=y
+CONFIG_SND_DRIVERS=y
+CONFIG_SND_HDA_PREALLOC_SIZE=64
+CONFIG_SND_USB=y
+CONFIG_SND_USB_AUDIO=y
+CONFIG_SND_USB_AUDIO_USE_MEDIA_CONTROLLER=y
+CONFIG_SND_SOC=y
+CONFIG_SND_SOC_GENERIC_DMAENGINE_PCM=y
+CONFIG_SND_SOC_ROCKCHIP=y
+CONFIG_SND_SOC_ROCKCHIP_I2S=y
+CONFIG_SND_SOC_ROCKCHIP_I2S_TDM=y
+CONFIG_SND_SOC_ROCKCHIP_PDM=y
+CONFIG_SND_SOC_ROCKCHIP_SPDIF=y
+CONFIG_SND_SOC_ROCKCHIP_SPDIFRX=y
+CONFIG_SND_SOC_ROCKCHIP_MAX98090=y
+CONFIG_SND_SOC_ROCKCHIP_MULTICODECS=y
+CONFIG_SND_SOC_ROCKCHIP_RT5645=y
+CONFIG_SND_SOC_ROCKCHIP_HDMI=y
+CONFIG_SND_SOC_DUMMY_CODEC=y
+CONFIG_SND_SOC_HDMI_CODEC=y
+CONFIG_SND_SOC_ES7202=y
+CONFIG_SND_SOC_ES7243E=y
+CONFIG_SND_SOC_ES8311=y
+CONFIG_SND_SOC_ES8316=y
+CONFIG_SND_SOC_MAX98090=y
+CONFIG_SND_SOC_RK3308=y
+CONFIG_SND_SOC_RK3328=y
+CONFIG_SND_SOC_RK817=y
+CONFIG_SND_SOC_RK_CODEC_DIGITAL=y
+CONFIG_SND_SOC_RL6231=y
+CONFIG_SND_SOC_RT5616=y
+CONFIG_SND_SOC_RT5640=y
+CONFIG_SND_SOC_RT5645=y
+CONFIG_SND_SOC_RT5651=y
+CONFIG_SND_SOC_SPDIF=y
+CONFIG_SND_SOC_TS3A227E=y
+CONFIG_SND_SIMPLE_CARD_UTILS=y
+CONFIG_SND_SIMPLE_CARD=y
+CONFIG_ANDROID_PARANOID_NETWORK=y
+CONFIG_ACCESS_TOKENID=y
+CONFIG_F2FS_GRADING_SSR=y
+CONFIG_OVERLAY_FS=y
+CONFIG_HUGETLBFS=y
+CONFIG_HUGETLB_PAGE=y
+CONFIG_CRYPTO_SEQIV=y
修改后的rk3568_standard_defconfig,如果大家不会修改可以直接参考我的另一篇博文(我成功运行的完整配置):OpenHarmony标准系统支持docker运行时的完整配置。
def _prepare_root(system_path, target_cpu):
root_dir = os.path.join(os.path.dirname(system_path), 'root')
if os.path.exists(root_dir):
shutil.rmtree(root_dir)
os.makedirs(root_dir, exist_ok=True)
_dir_list = [
'config', 'dev', 'proc', 'sys', 'updater', 'system', 'vendor', 'data',
'chipset', 'storage', 'mnt', 'tmp', 'sys_prod', 'chip_prod',
'run', 'var', 'opt', 'usr'
]
for _dir_name in _dir_list:
os.makedirs(os.path.join(root_dir, _dir_name), exist_ok=True)
os.symlink('/system/bin', os.path.join(root_dir, 'bin'))
os.symlink('/system/bin/init', os.path.join(root_dir, 'init'))
os.symlink('/system/etc', os.path.join(root_dir, 'etc'))
if target_cpu == 'arm64':
os.symlink('/system/lib64', os.path.join(root_dir, 'lib'))
else:
os.symlink('/system/lib', os.path.join(root_dir, 'lib'))
修改openharmony3.1/base/security/selinux/sepolicy/base/system/file_contexts
# 增加for docker编译并在设备运行openharmony系统
/run u:object_r:rootfs:s0
/var u:object_r:rootfs:s0
/opt u:object_r:rootfs:s0
/usr u:object_r:rootfs:s0
/lib u:object_r:rootfs:s0
具体过程参考我的前两篇文章:
DAYU200体验 OpenHarmony3.1 Release编译(一)
DAYU200体验 OpenHarmony3.1 Release烧录(二)
并且通过hdc_std标准工具(通过蓝色的debug线也就是烧录线与PC进行通信)进入oh系统
# 查看是否有oh设备格式化sd卡为f2fs文件系统docker overlay filesystem推荐backing filesystem是未加密的f2fs。而RK3568的data分区是加密的ext4,可以通过micro sd card卡扩展RK3568的存储将sd card格式化为f2fs解决此问题。准备一个sd卡,插入到DAYU200板子上
D:>hdc_std.exe list targets
# 进入oh系统
D:>hdc_std.exe shell
# 修改root目录下的权限使其可以进行文件操作
mount -o rw,remount -t auto /
# 查看系统文件系统格式安装ip、iptables和awk必备组件通过有线或者无线连接网络
blkid
# 查看系统文件系统和挂载情况
df -h
# 确定sd卡的名称并且格式化sd卡为f2fs
blkid
mkfs.f2fs /dev/sdc1
# 查看正在运行的由于润和DAYU200是arm64类型的主板,所以需要安装第三方组件的arm64版本并且是静态二进制文件。有三种方式:在官网直接获得静态二进制文件,在arm主机源码编译获得静态二进制文件以及在x86_64主机交叉编译获得静态二进制组件。
ifconfig
# 查看所有的网络接口
ifconfig -a
# 开启ip forward
echo "1" > /proc/sys/net/ipv4/ip_forward
# 交叉编译环境的搭建安装iproute2
# 查看有哪些编译工具的版本可以安装
apt-cache search aarch64
# 选择某个版本的进行安装
apt-get install gcc-10-aarch64-linux-gnu
# 如果出现缺失E: Unmet dependencies 错误,再运行下面一条命令即可
apt --fix-broken install
# 可以查看里边的版本信息,里边有host是什么,target是什么
aarch64-linux-gnu-gcc -v
# 交叉编译的方式获得静态二进制文件安装iptables
# 下载:iproute2-4.9.0源码
https://mirrors.edge.kernel.org/pub/linux/utils/net/iproute2/
# 解压并且进入源码文件修改configure文件
CC和ar 修改成aarch64-linux-gnu- 的路径
./configure
# 修改修改Makefile,CC为交叉编译器的路径,修改SUBDIRS=lib ip
# 静态编译,否则,运行时报缺少.so文件
make LDFLAGS=-static
# 过程可参考
https://www.cxybb.com/article/hylaking/95336108
# 也可以直接在arm主机上直接静态编译源码
./configure
make LDFLAGS=-static
# 在源码文件目录下可以找到编译好的可执行二进制文件
ip
# 将ip程序利用hdc_std命令传到openhramony系统内
hdc_std.exe file send d:\ip /data/tmp/
# 如果发送失败,修改一下主目录的权限
hdc_std.exe shell
mount -o rw,remount -t auto /
# 在openharmony内给ip权限并且将其加入环境变量,便可使用iproute2命令了
chmod +x ip
export PATH=$PATH:/data/tmp/
# iptables与iproute2的安装相近安装busybox组件
# 源码下载并且解压
http://www.netfilter.org/projects/iptables/files/iptables-1.8.7.tar.bz2
# 交叉编译或者在arm主机直接静态编译获得静态二进制文件
# 交叉编译过程可以参考
https://www.cnblogs.com/eleclsc/p/11686287.html
# 通过hdc_std上传到openharmony系统内
# 在openharmony内给iptables权限并且将其加入环境变量,便可使用iptables命令了
# 比较特别的是虽然DAYU200板子是arm64位的,iptables交叉编译成32位openharmony才能正常使用
# busybox官网直接提供了arm64静态二进制文件安装docker容器引擎组件创建cgroups.json
https://busybox.net/downloads/binaries/1.28.1-defconfig-multiarch/
# 在其他PC机上
wget https://busybox.net/downloads/binaries/1.28.1-defconfig-multiarch/busybox-armv8l
# 通过hdc_std上传到openharmony系统内,如下操作即可使用busybox的所有工具了
mkdir /system/xbin/
hdc_std.exe file send d:\busybox /system/xbin/
cd /system/xbin
chmod +x busybox
export PATH=$PATH:/system/xbin/
busybox --install .
# 具体可以参考
https://www.cnblogs.com/biang/p/6703238.html
# 在/etc/下创建cgroups.json,用busybox包含的工具创建即可安装docker静态二进制文件
touch /etc/cgroups.json
cd etc
vi cgroups.json
# cgroups.json内容填写一下内容
{
"Cgroups": [
{
"UID": "system",
"GID": "system",
"Mode": "0755",
"Controller": "blkio",
"Path": "/dev/blkio"
},
{
"UID": "system",
"GID": "system",
"Mode": "0755",
"Controller": "cpu",
"Path": "/dev/cpu"
},
{
"Mode": "0555",
"Path": "/dev/cpuacct",
"Controller": "cpuacct"
},
{
"UID": "system",
"GID": "system",
"Mode": "0755",
"Controller": "cpuset",
"Path": "/dev/cpuset"
},
{
"UID": "system",
"GID": "system",
"Mode": "0755",
"Controller": "memory",
"Path": "/dev/memcg"
},
{
"UID": "system",
"GID": "system",
"Mode": "0755",
"Controller": "schedtune",
"Path": "/dev/stune"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "devices",
"Path": "/dev/devices"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "freezer",
"Path": "/dev/freezer"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "hugetlb",
"Path": "/dev/hugetlb"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "net_cls",
"Path": "/dev/net_cls"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "net_prio",
"Path": "/dev/net_prio"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "perf_event",
"Path": "/dev/perf_event"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "pids",
"Path": "/dev/pids"
},
{
"GID": "system",
"UID": "system",
"Mode": "0755",
"Controller": "rdma",
"Path": "/dev/rdma"
}
],
"Cgroups2": {
"UID": "root",
"GID": "root",
"Mode": "0600",
"Path": "/dev/cg2_bpf"
}
}
# 下载docker static binariesdocker环境准备
https://download.docker.com/linux/static/stable/aarch64/
若为32位选择armhf版。
# 解压并且加入环境变量
tar zxvf 到/system/bin下
export PATH=$PATH:/system/bin/
export PATH=$PATH:/system/bin/docker/
运行脚本(如果脚本无法运行也可以按脚本一步一步来)
# mkdir on /system运行docker
if [ ! -d "/system/etc/docker" ]; then
mkdir /system/etc/docker
fi
# mkdir on /data
if [ ! -d "/data/var" ]; then
mkdir /data/var
else
rm -rf /data/var/run
fi
if [ ! -d "/data/run" ]; then
mkdir /data/run
fi
if [ ! -d "/data/tmp" ]; then
mkdir /data/tmp
fi
if [ ! -d "/data/opt" ]; then
mkdir /data/opt
fi
if [ ! -d "/data/etc" ]; then
mkdir /data/etc
mkdir /data/etc/docker
fi
if [ ! -d "/data/usr" ]; then
mkdir /data/usr
fi
if [ ! -d "/mnt/f2fs" ]; then
mkdir /mnt/f2fs
fi
# 这里对应刚刚已经被f2fs格式化的sd卡设备,可以用blkid查看到具体的名称
mount /dev/block/mmcblk0p1 /mnt/f2fs/
mount tmpfs /sys/fs/cgroup -t tmpfs -o size=1G
if [ ! -d "/sys/fs/cgroup/blkio" ]; then
mkdir /sys/fs/cgroup/blkio
mkdir /sys/fs/cgroup/cpu
mkdir /sys/fs/cgroup/cpuacct
mkdir /sys/fs/cgroup/cpuset
mkdir /sys/fs/cgroup/devices
mkdir /sys/fs/cgroup/freezer
mkdir /sys/fs/cgroup/hugetlb
mkdir /sys/fs/cgroup/memory
mkdir /sys/fs/cgroup/net_cls
mkdir /sys/fs/cgroup/net_prio
mkdir /sys/fs/cgroup/perf_event
mkdir /sys/fs/cgroup/pids
mkdir /sys/fs/cgroup/rdma
mkdir /sys/fs/cgroup/schedtune
mkdir /sys/fs/cgroup/systemd
fi
# mount --bind
mount --bind /data/etc/docker /etc/docker
mount --bind /data/var /var
mount --bind /data/run /run
mount --bind /data/tmp /tmp
mount --bind /data/opt /opt
mount --bind /data/usr /usr
mount -t cgroup -o none,name=systemd cgroup /sys/fs/cgroup/systemd
mount -t cgroup -o blkio,nodev,noexec,nosuid cgroup /sys/fs/cgroup/blkio
mount -t cgroup -o cpu,nodev,noexec,nosuid cgroup /sys/fs/cgroup/cpu
mount -t cgroup -o cpuacct,nodev,noexec,nosuid cgroup /sys/fs/cgroup/cpuacct
mount -t cgroup -o cpuset,nodev,noexec,nosuid cgroup /sys/fs/cgroup/cpuset
mount -t cgroup -o devices,nodev,noexec,nosuid cgroup /sys/fs/cgroup/devices
mount -t cgroup -o freezer,nodev,noexec,nosuid cgroup /sys/fs/cgroup/freezer
mount -t cgroup -o hugetlb,nodev,noexec,nosuid cgroup /sys/fs/cgroup/hugetlb
mount -t cgroup -o memory,nodev,noexec,nosuid cgroup /sys/fs/cgroup/memory
mount -t cgroup -o net_cls,nodev,noexec,nosuid cgroup /sys/fs/cgroup/net_cls
mount -t cgroup -o net_prio,nodev,noexec,nosuid cgroup /sys/fs/cgroup/net_prio
mount -t cgroup -o perf_event,nodev,noexec,nosuid cgroup /sys/fs/cgroup/perf_event
mount -t cgroup -o pids,nodev,noexec,nosuid cgroup /sys/fs/cgroup/pids
mount -t cgroup -o rdma,nodev,noexec,nosuid cgroup /sys/fs/cgroup/rdma
mount -t cgroup -o schedtune,nodev,noexec,nosuid cgroup /sys/fs/cgroup/schedtune
# ip route
ip rule add pref 1 from all lookup main
ip rule add pref 2 from all lookup default
###
# setup dns nameserver and docker images registry
echo "{\"registry-mirrors\":[\"https://docker.mirrors.ustc.edu.cn\"],\"experimental\":false,\"storage-driver\": \"overlay2\",\"data-root\": \"/mnt/f2fs\"}" > /etc/docker/daemon.json
# open br_netfilter module
#modprobe br_netfilter
setenforce 0
# run dockerd验证docker工作状态
dockerd -D -H tcp://0.0.0.0:2375 -H unix:///var/run/docker.sock &
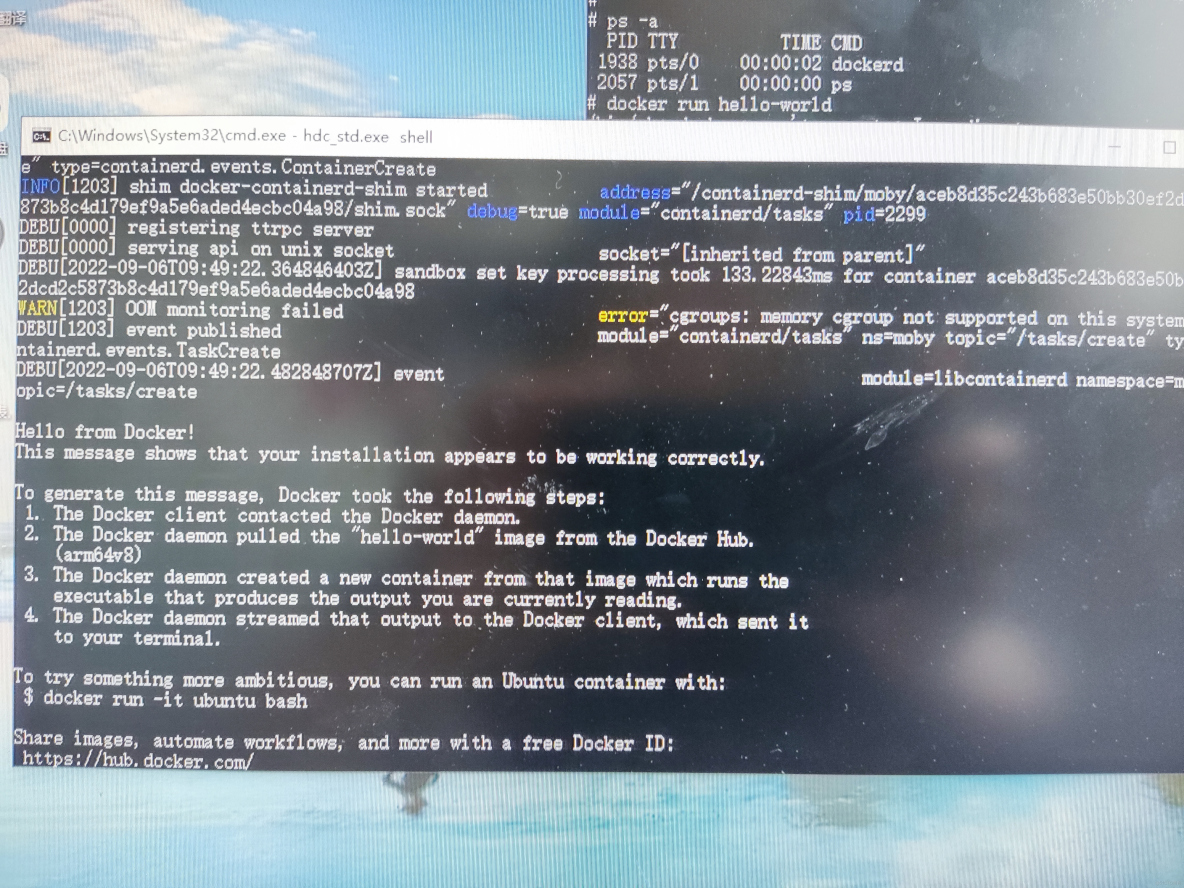
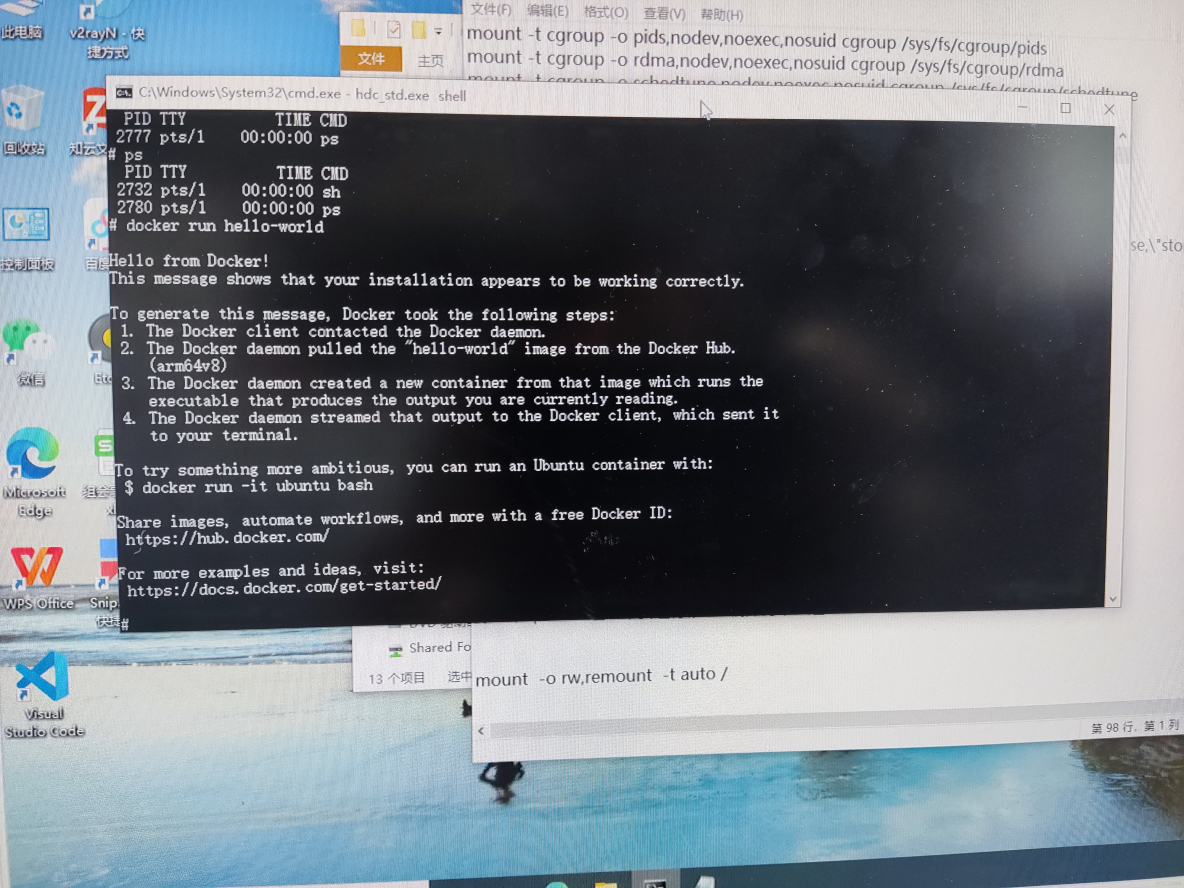
# docker run hello-world
Hello from Docker!
This message shows that your installation appears to be working correctly.
To generate this message, Docker took the following steps:
1. The Docker client contacted the Docker daemon.
2. The Docker daemon pulled the "hello-world" image from the Docker Hub.
(arm64v8)
3. The Docker daemon created a new container from that image which runs the
executable that produces the output you are currently reading.
4. The Docker daemon streamed that output to the Docker client, which sent it
to your terminal.
To try something more ambitious, you can run an Ubuntu container with:
$ docker run -it ubuntu bash
Share images, automate workflows, and more with a free Docker ID:
https://hub.docker.com/
For more examples and ideas, visit:
https://docs.docker.com/get-started/
# 查看docker的信息
docker version
docker info
docker ps -a
docker images





.png)

.png)

